GPS/IMU Driver & Sensor Fusion
Sep — Dec 2025
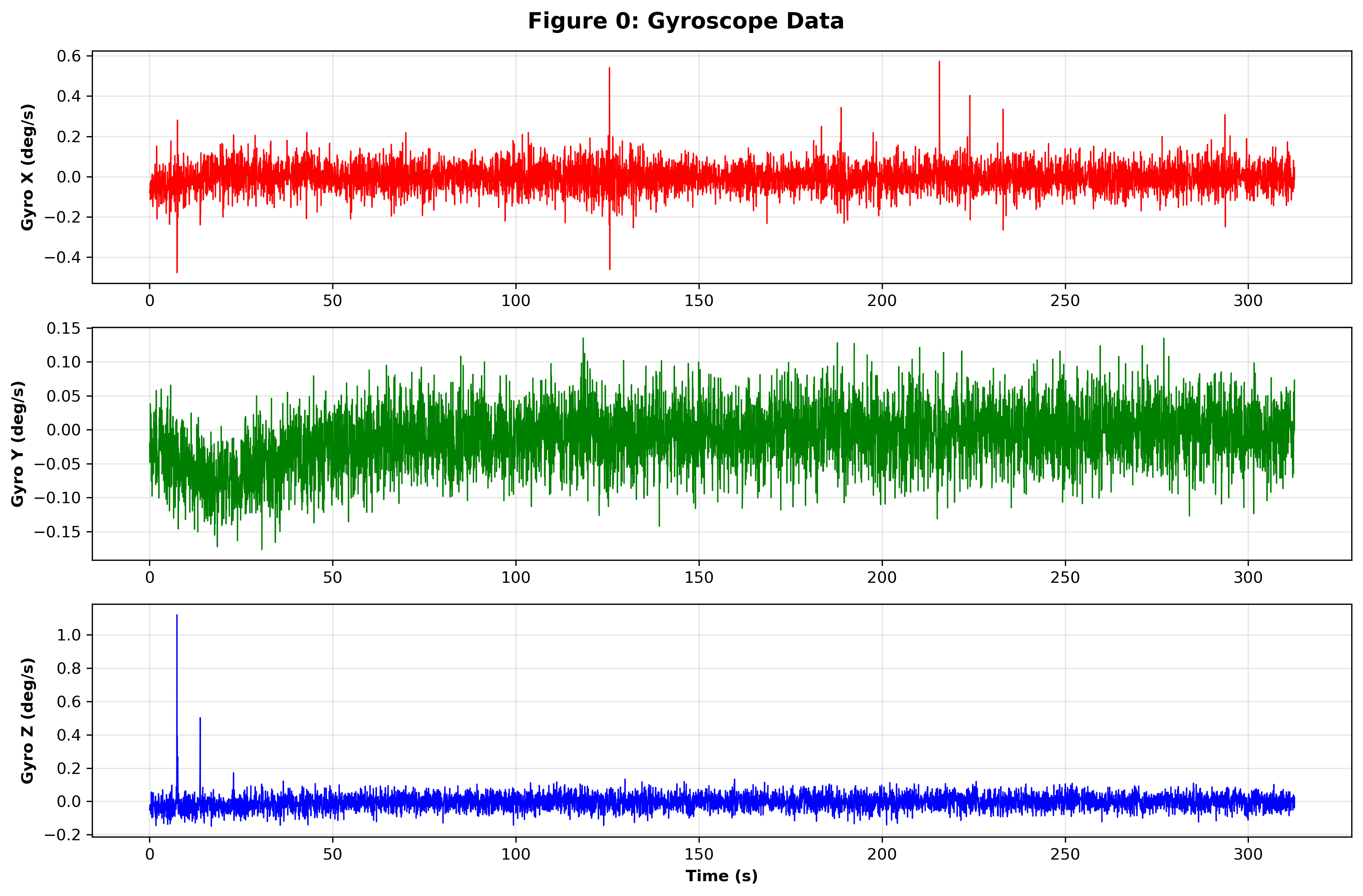
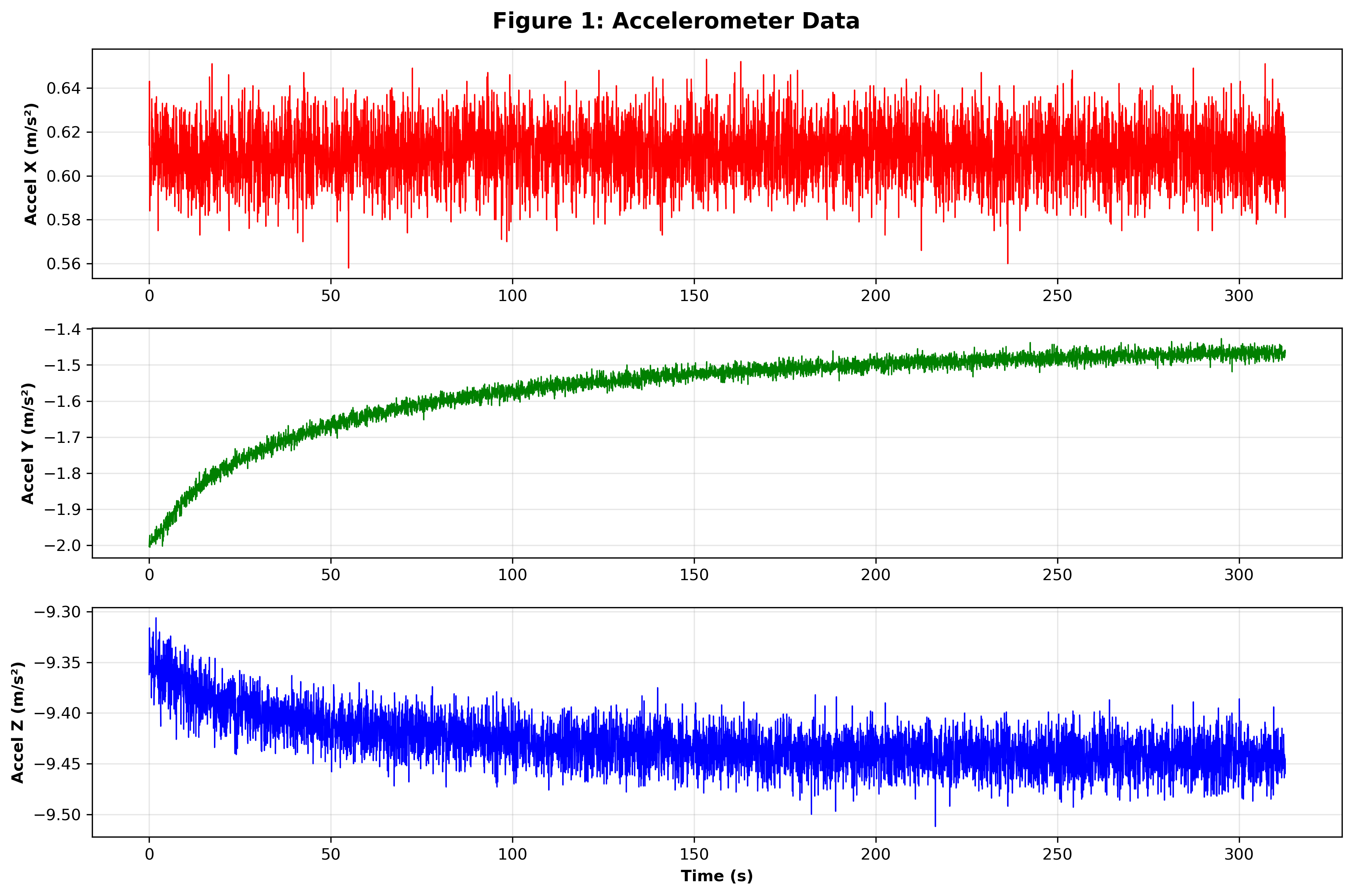
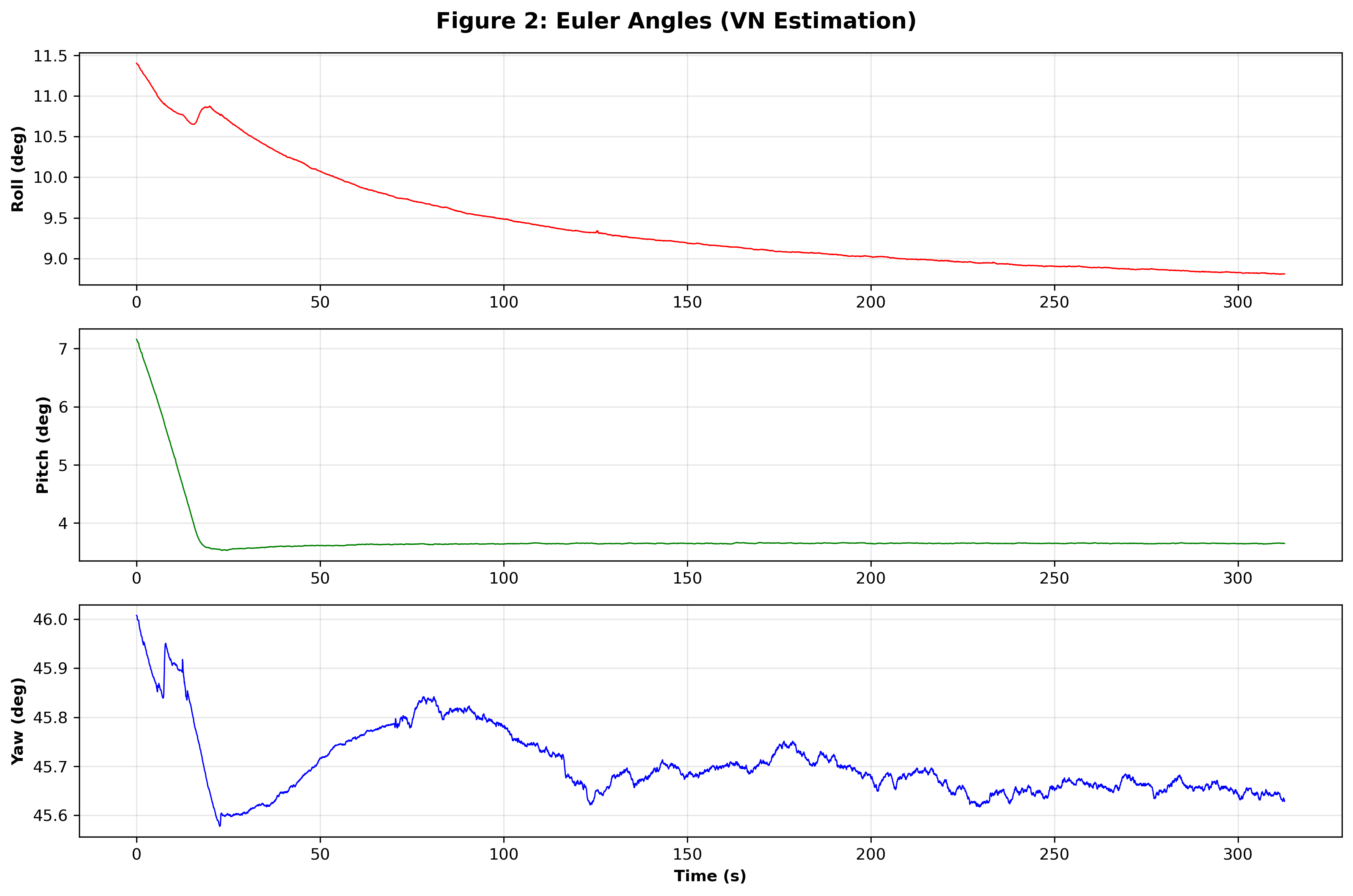
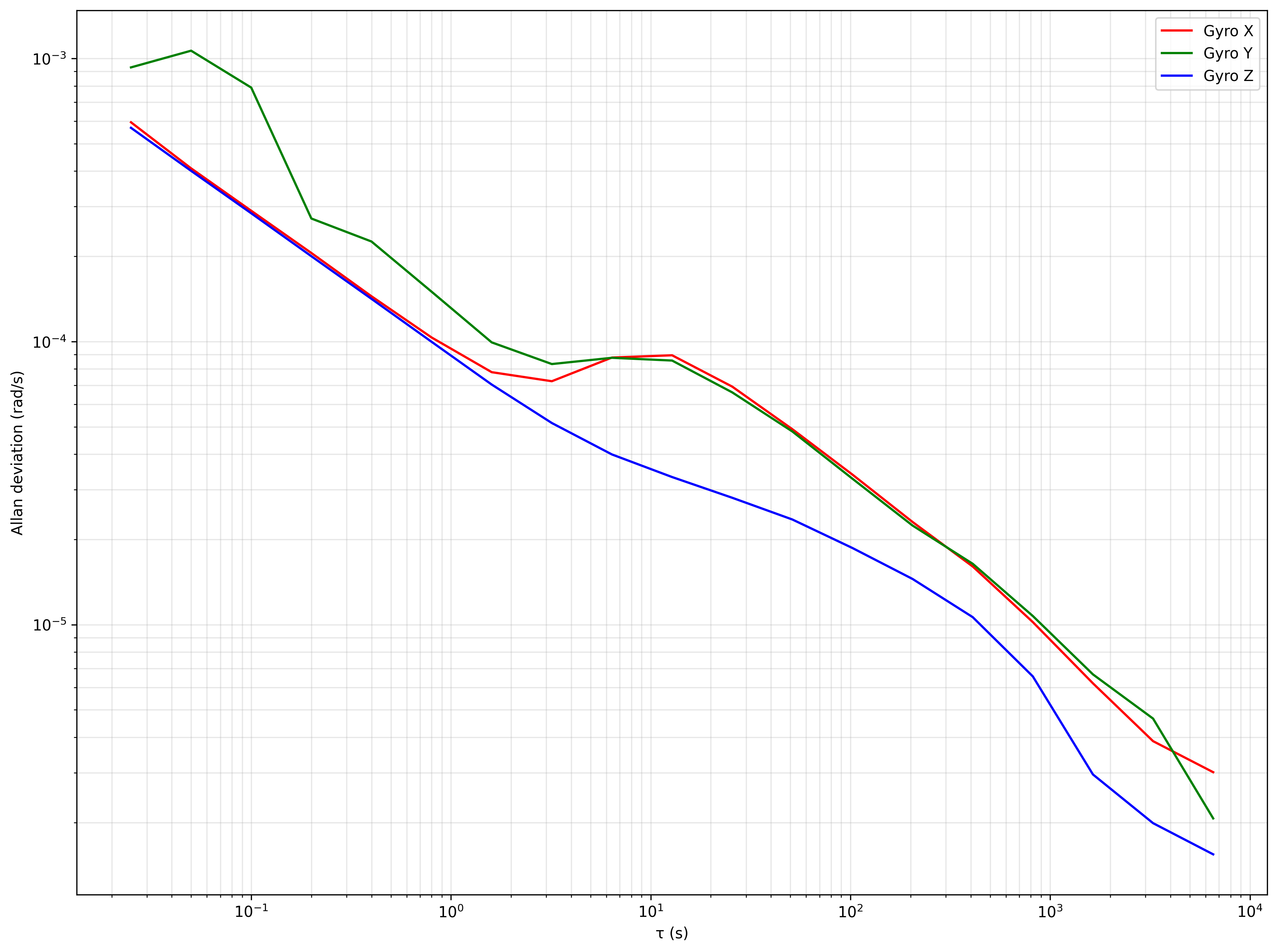
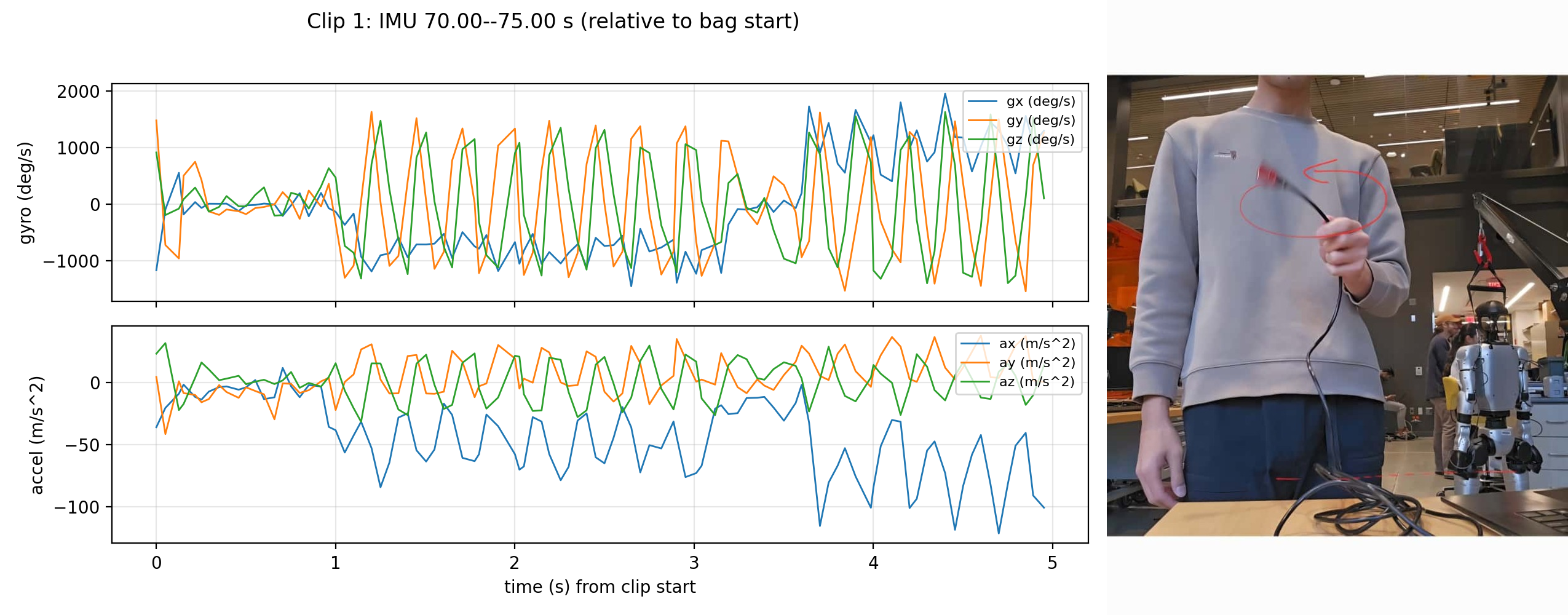
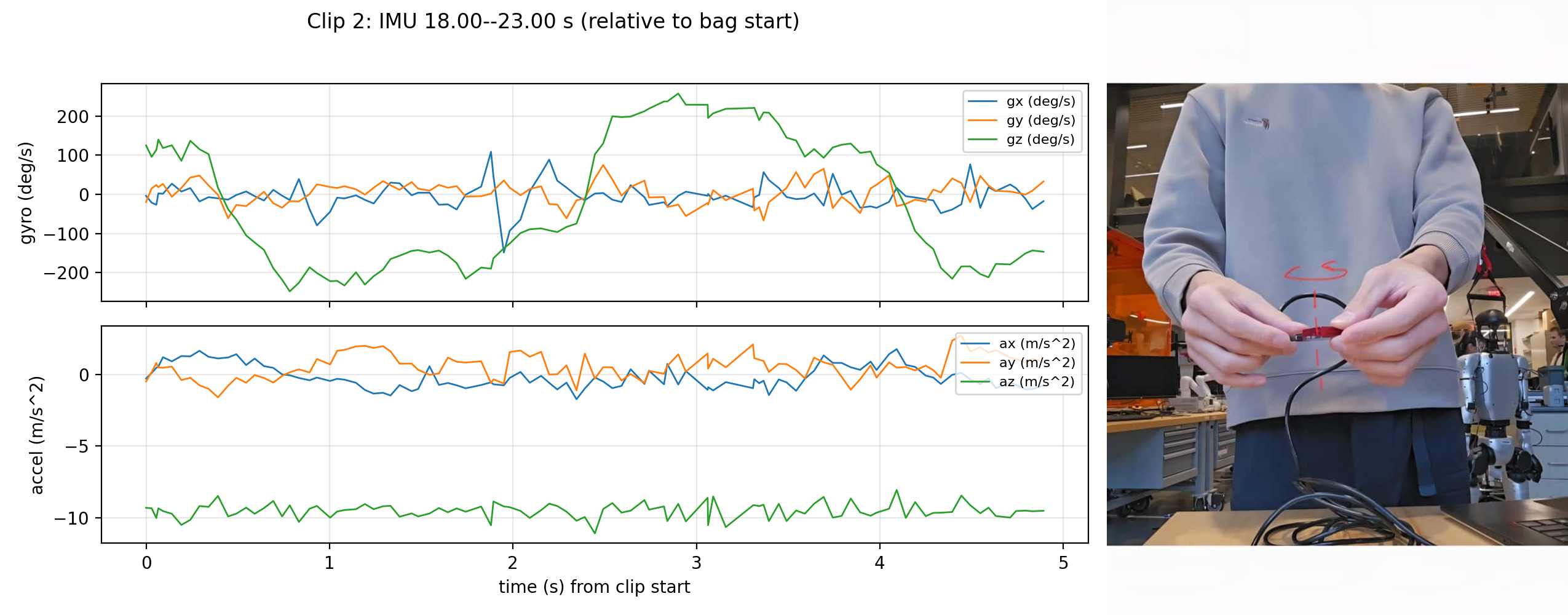
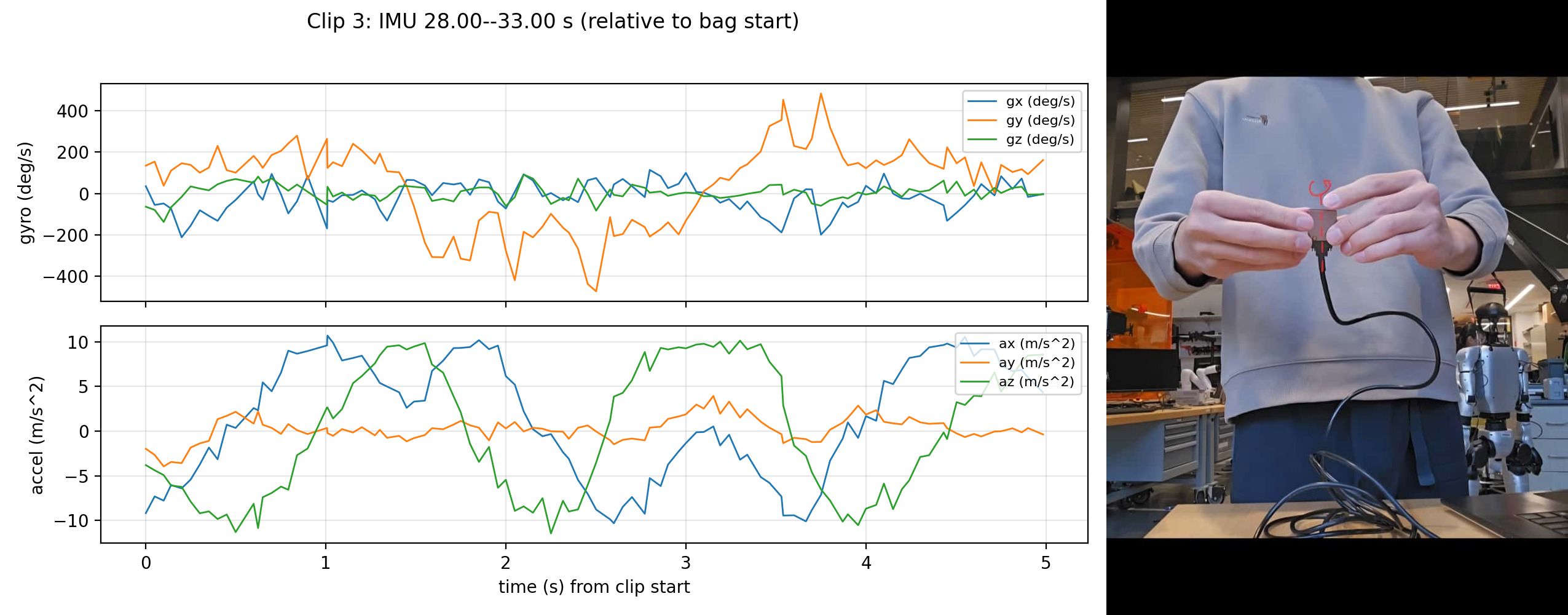
Write a device driver that communicates with the VectorNav IMU over USB serial, collect rotation, acceleration, magnetometer, and rotational rate data. Identify device parameters (e.g., angle random walk, bias stability, rate random walk) and sources of error from Allan variance data